×
模态框(Modal)标题
在这里添加一些文本
Close
Close
Submit
Cancel
Confirm
×
模态框(Modal)标题
×
Welcome to visit China Journal of Highway and Transport,Today is
Share:
Toggle navigation
Home
About Journal
Editorial Board
Instruction
Publishing Ethics
Journal Online
Just Accepted
Current Issue
Archive
Most Access
Most Download
Most Cited
Email Alert
RSS
Subscription
Contact Us
中文
Figure/Table detail
冲击压路机路径优化与控制方法
China Journal of Highway and Transport
, 2024, 37(
11
): 311-322. DOI:
10.19721/j.cnki.1001-7372.2024.11.024
型号
生产商
冲击能/kJ
轮宽/m
轮间隙/m
转弯半径/m
YCT25T
洛阳晟路
25
0.90
1.16
6.00
Table 1
Basic Parameters of Impact Roller
Other figure/table from this article
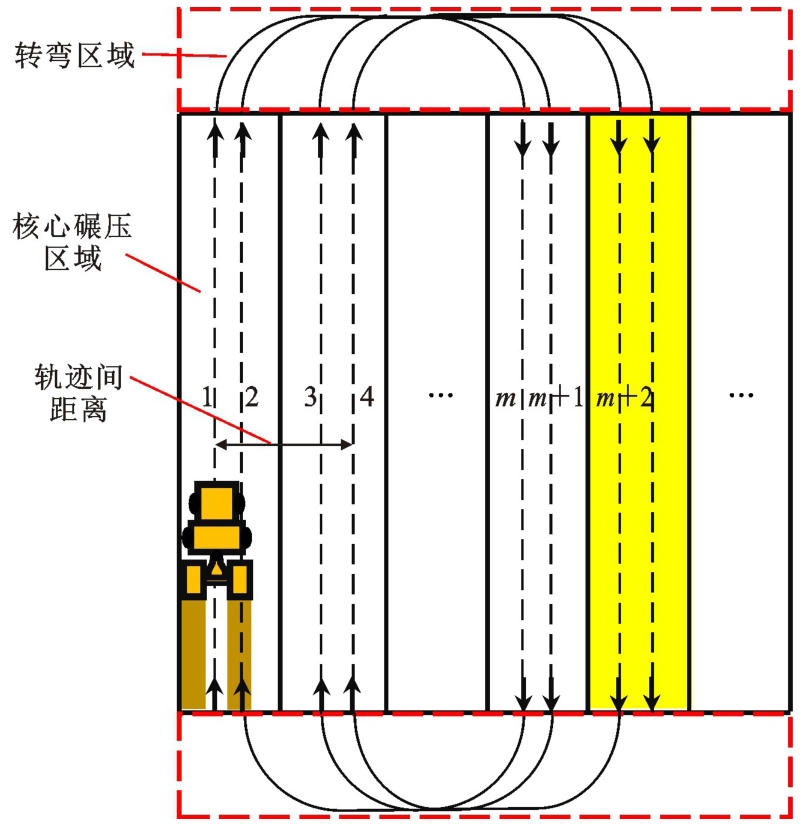
Fig. 1
Non-overlapping of Staggered Drum Paths
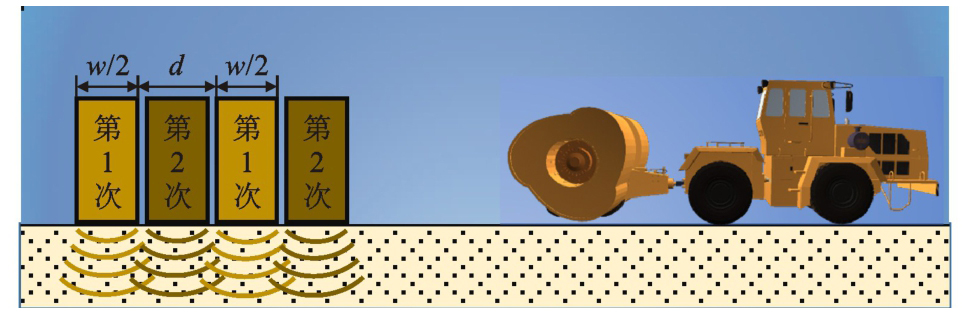
Fig. 2
Schematic Diagram of Filling Forefield and Impact Roller Compaction Process
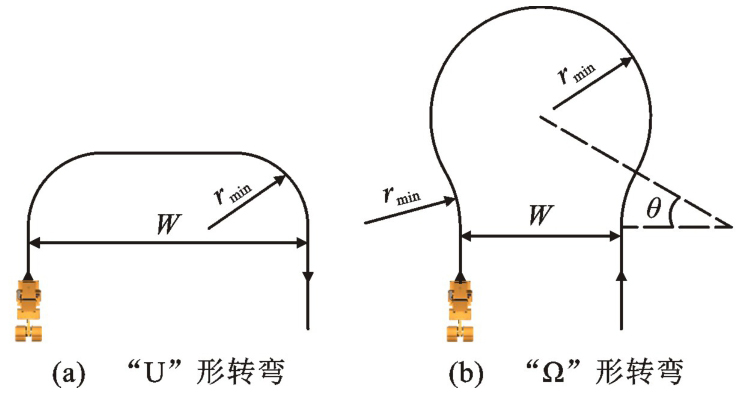
Fig. 3
Turning Style of Impact Roller
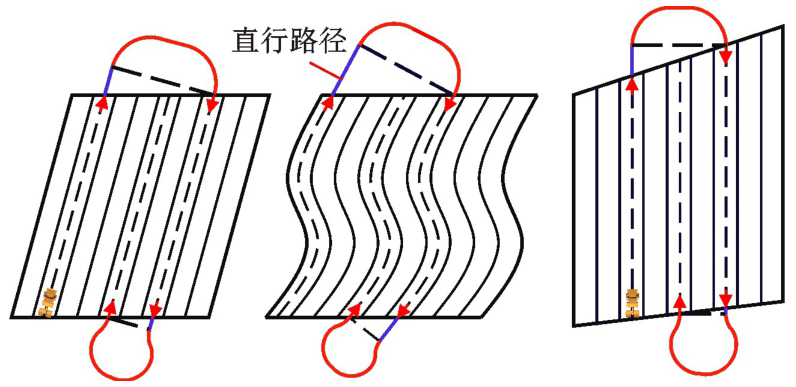
Fig. 4
Irregular Shape of Forfields
Fig. 5
Modeling and Solving of Compaction Path Optimization Problem
Fig. 6
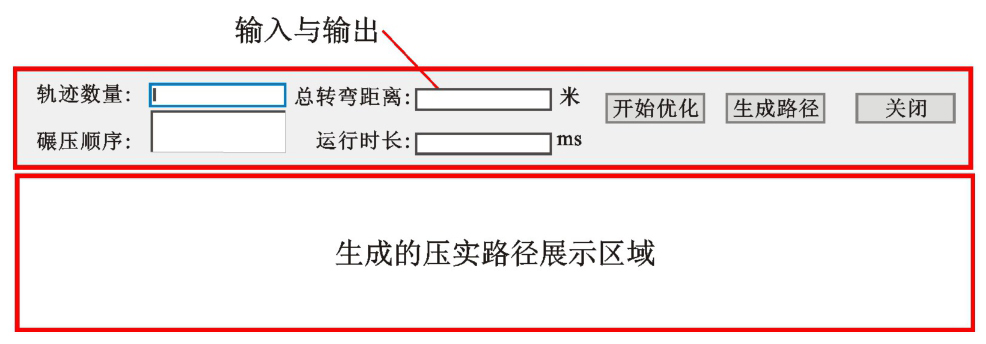
Interface of the Developed Compaction Path Solver
Fig. 7
Path Navigation Design Program
Fig. 8
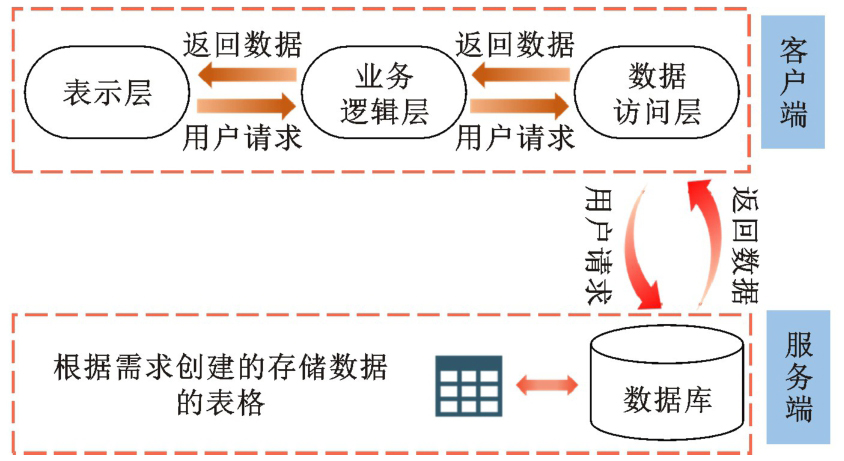
C/S Framework
Fig. 9
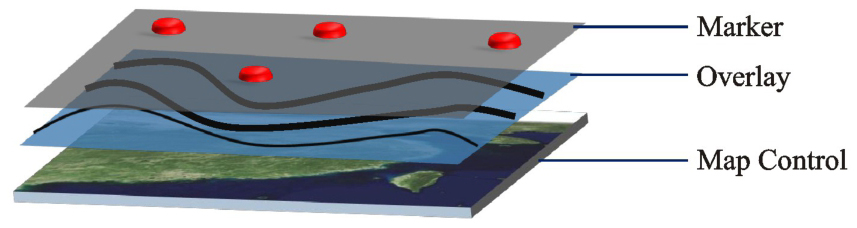
Hierarchical Structure of
Fig. 10
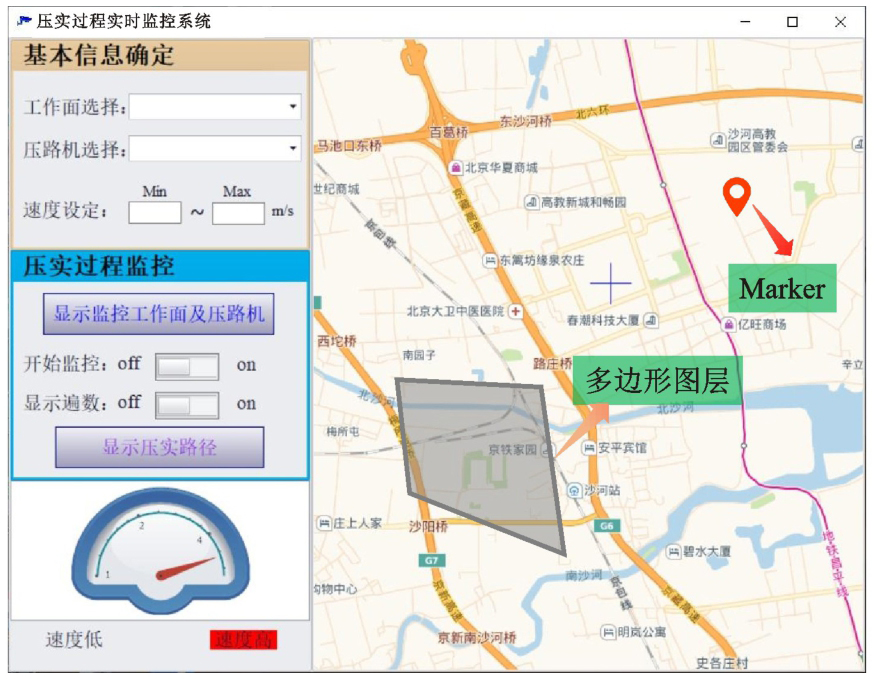
Effect of Loading Amap
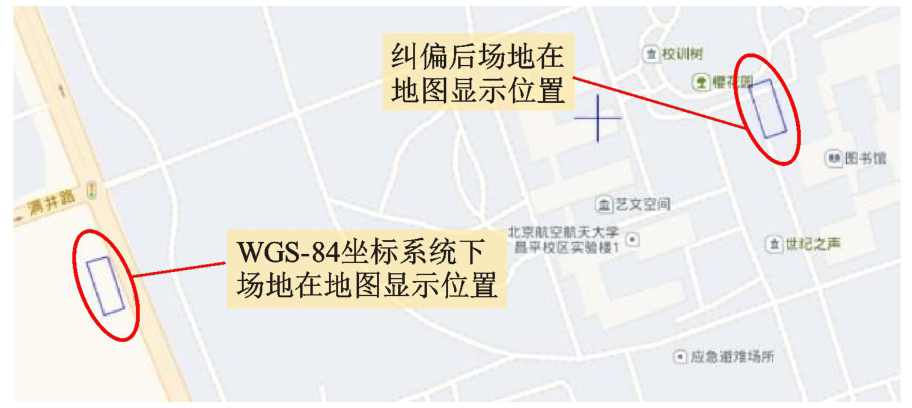
Fig. 11
Location of the Test Site Before and After Coordinate Correction
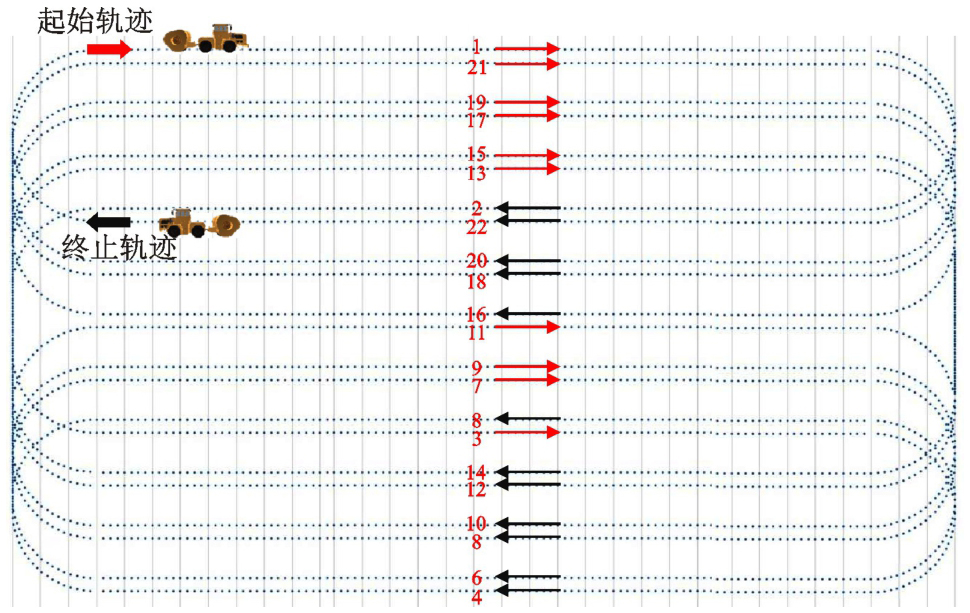
Fig. 12
Schematic Diagram of the Optimal Compaction Path with 22 Tracks
Table 2
Results of Different Methods
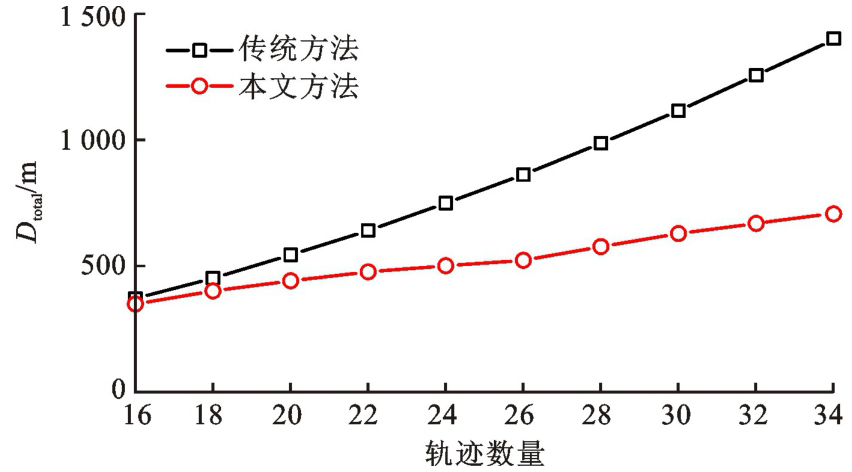
Fig. 13
Total Turning Distance Corresponding to Different Methods in Different Cases
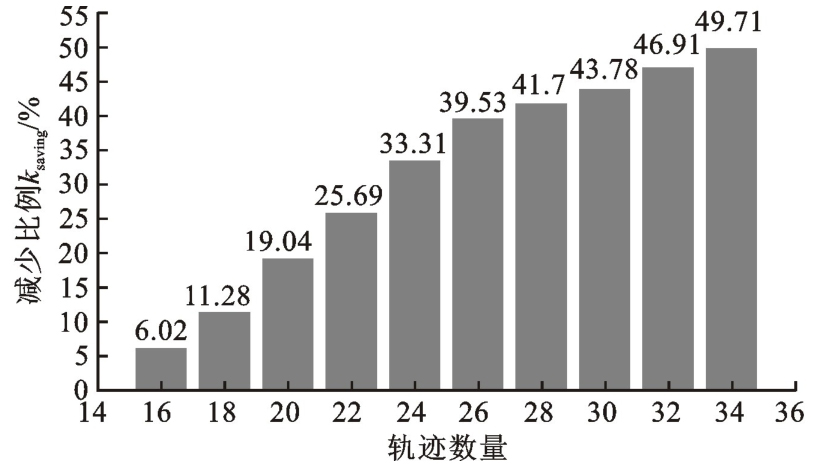
Fig. 14
Saving of Total Turning Distance with the Proposed Method in Different Cases
Fig. 15
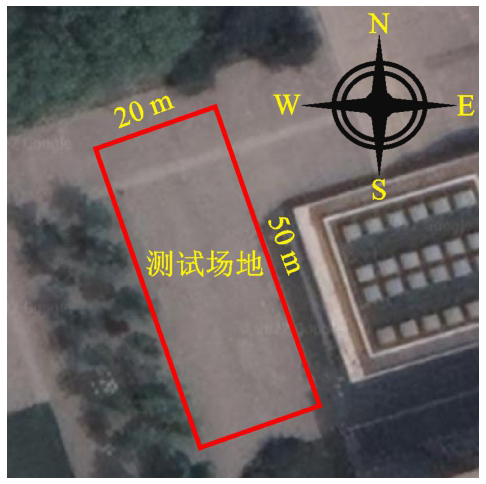
Test Site
Fig. 16
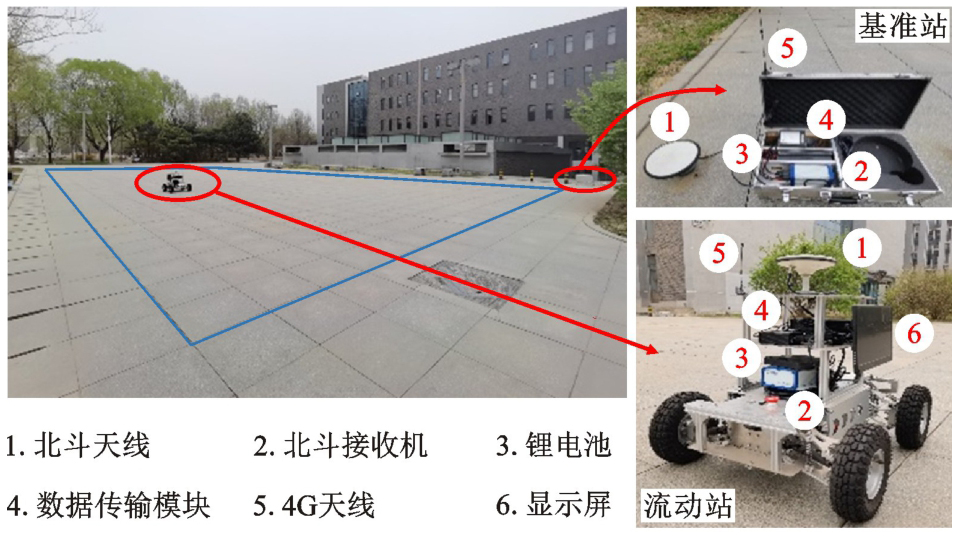
Field Test
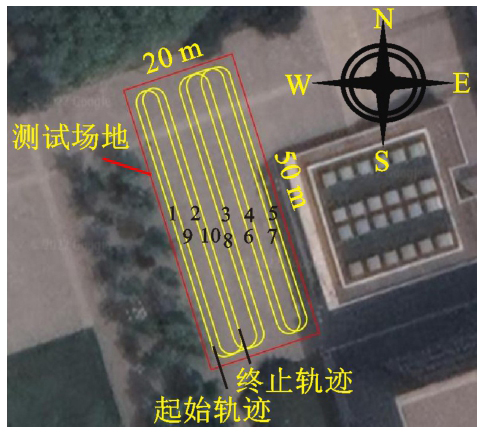
Fig. 17
Schematic Diagram of the Optimal Compaction Path for the Test Site
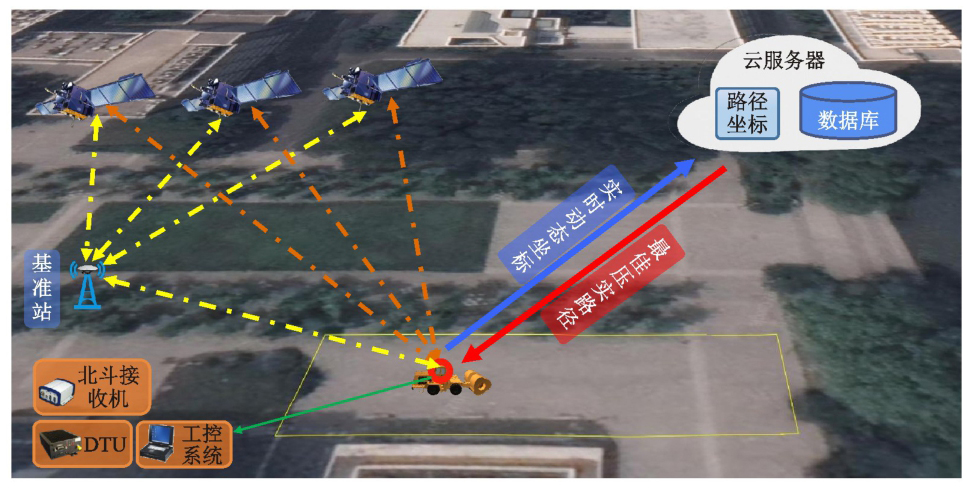
Fig. 18
Schematic Diagram of the Information Transmission Process
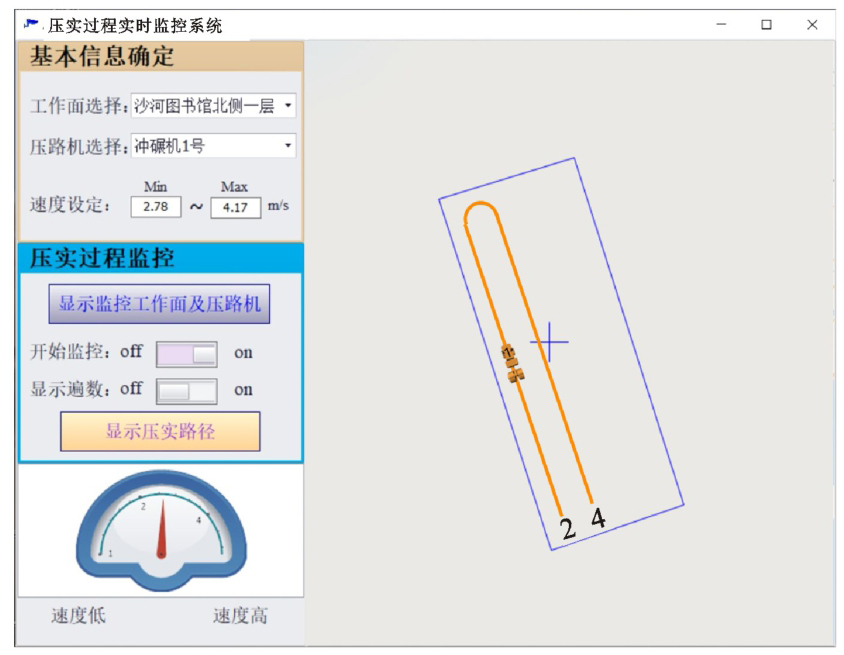
Fig. 19
Real-time Control of the Compaction Path