×
模态框(Modal)标题
在这里添加一些文本
关闭
关闭
提交更改
取消
确定并提交
×
模态框(Modal)标题
×
欢迎访问《中国公路学报》官方网站,今天是
分享到:
Toggle navigation
首页
期刊介绍
编委会
投稿指南
出版伦理
在线期刊
最新录用
当期目录
过刊浏览
阅读排行
下载排行
引用排行
E-mail Alert
RSS
期刊订阅
联系我们
English
图/表 详细信息
面向自动驾驶开发测试的切入场景风险评价与建模
李鹏辉, 周逻雁, 胡越宁, 董倩茹, 胡文浩, 胡孟夏, 肖凌云
中国公路学报, 2025, 38(
8
): 397-408. DOI:
10.19721/j.cnki.1001-7372.2025.08.028
参数
取值范围
详细说明
前向关键目标
CIPV
0、1
本车道内前方最近的目标车辆
切入车与车道线距离
D
x
/m
-
切入车辆与车道线的距离
压线时刻
T
cutin
/(帧·s
-1
)
非负整数
切入车辆开始接触车道线时刻
切入起始点
T
begin
/(帧·s
-1
)
非负整数
切入车辆开始变道时刻
切入结束点
T
end
/(帧·s
-1
)
非负整数
切入车辆结束变道时刻
表2
切入片段自动提取算法参数说明
本文的其它图/表
表1
自然驾驶数据来源及内容
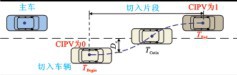
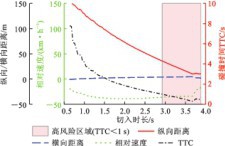
图1
车辆切入场景示意
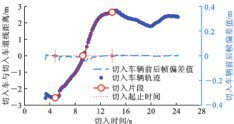
图2
切入车辆运动状态示意
图3
切入关键帧视频数据示意
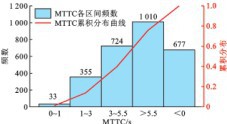
图4
提取切入片段最小碰撞时间MTTC分布
图5
主观评价切入视频示意
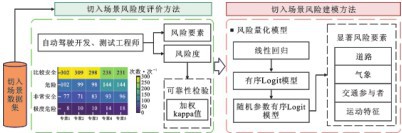
图6
本文研究方法
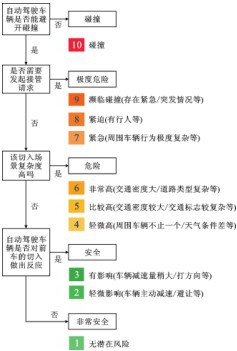
图7
自动驾驶车辆切入场景风险度主观评价流程
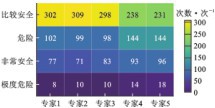
图8
切入场景主观风险度评价结果分布
表3
Fleiss'Kappa系数一致性检验结果
表4
切入场景风险数据集描述性统计
表5
模型拟合优度指标对比
表6
随机参数有序Logit模型参数估计结果
表7
自动驾驶切入场景风险度边际效应
图9
自动驾驶车辆应对切入场景风险数据集风险要素示例
图10
高风险切入场景动态轨迹示例